
液压系统的固有频率(自然频率)是指系统的刚度。当需要更快加速的时候,系统固有频率越高,越容易控制。
液压缸可以简化为两端带弹簧的质量体模型。具有较低固有频率(固有频率表现为系统受到突然的启动或停止,系统会振荡的现象)的系统,相对于负载质量而言,其弹簧刚度也低。相反,具有高的固有频率的系统,其弹簧刚度也会高。因此,相对于加速频率(frequency of acceleration)而言,油缸的固有频率该多高才合适呢?理论上,固有频率应该至少是4倍的加速频率—在此频率油缸的活塞和负载质量开始加速运动。这一点已经在使用标准的液压运动控制器上得到验证。
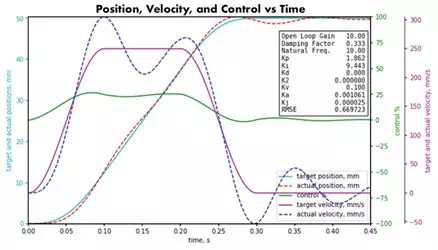
图1中,加速频率是5 Hz,固有频率是10 Hz。实际的位置和速度无法精确跟随目标值;注意均方根误差(RMSE)。运动时,出现爬行现象。
液压系统的固有频率是根据负载质量,油缸活塞腔和杆腔的面积,以及油液的体积弹性模量来计算的。

ωn =[4´ βA2/(V´M)]1/2
此处:
ωn:油缸和负载的固有频率;
β:油液的体积弹性模量;
A:活塞腔作用面积;
V :在伺服阀和活塞之间的油液体积;
M:负载质量
阐述加速频率的一个简单例子就是,油缸和负载在5Hz频率下做正弦运动。在此种情况下,加速频率就是5Hz。如果油缸只是做一个简单的运动,从一个位置到另外一个位置,其最小的加速或减速时间是0.5s。这里假定了加速和减速斜坡是按正弦S曲线,具有基频(fundamental frequency)而无谐波。(线性斜坡具有基频和很多谐波,因此会导致很多问题)
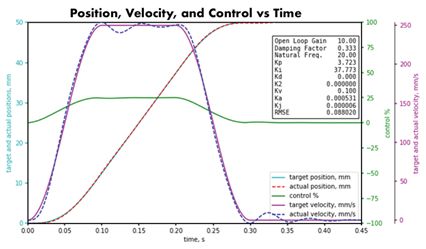
图2与图1相同的系统,但是固有频率从10Hz上升到20Hz,因此其是加速频率的4倍。现在实际位置可以精确的跟随目标值。注意图中的RMSE。
大多数运动控制器通过比率表达加速度。例如,2500 mm/sec2 大约是重力加速度的四分之一。在2500 mm/sec2 的加速度,按250mm/s加速,时间需要0.1s,因此加速频率就是5Hz(0.5/0.1 sec. = 5 Hz)。如果按100mm/sec加速,加速时间就是0.04s,则加速频率就是12.5Hz。
人们经常问到为什么短行程的调节与长行程的调节存在不同。原因就在于短行程加速时间太短,因此其加速频率要高很多。如果固有频率不是最大加速频率的4倍以上,系统就很难控制好。
上面的例子中,12.5Hz的加速频率也许比1/4的固有频率高。因此,为了使用运动控制器时能有更好的控制,最好把加速斜坡降低到1000mm/sec2 ,而其加速时间依然是0.1s。
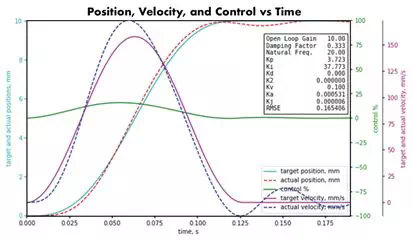
图3,该系统的加速频率是8Hz,但是固有频率仅有20Hz。不采取高级别的控制策略,跟踪误差就会很大。
为什么固有频率需要是加速频率的4倍
固有频率理论上需要是加速频率的4倍以上。如果不是,你将会发现非常困难,甚或不可能通过优化控制器来达到实际位置与跟踪目标值误差值很小。如果固有频率高于加速频率的4倍,就会非常容易优化控制器的增益。
图1,加速频率是5Hz,而固有频率是10Hz。固有频率只是加速频率的两倍,因此跟踪误差很大。(注意均方根误差,RMSE)。
图2,固有频率提高到20Hz以后,目标值与实际值之间的误差就减小了很多。
我们的分析假定控制器具有PI(比例积分)控制功能,带速度和加速度前馈(前馈能够预知期望的控制器输出而不是等着通过误差反馈去控制输出)。如果控制器不具有PI控制,或者不提供速度和加速度前馈,那么,固有频率与加速频率的比率就需要高很多,以确保跟踪误差最小。
例如,甚至即使固有频率是加速频率的10倍以上,如果控制器只有比例控制功能,其结果仍将有稳态误差。如果期望稳态误差接近于零,就不要只用比例控制!
大多数高级的控制器都具有保持目标值与实际值误差非常小的功能,即使固有频率只有加速频率的两倍。
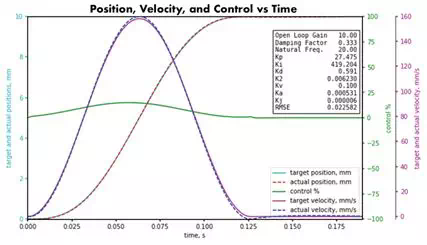
图4,高级的运动控制器具有派生的增益和前馈控制,即使固有频率不是加速频率的4倍,也有可能获得很精密的控制。注意RMSE值相对于图3的变化。
这意味着什么
省钱!一般来说,固有频率较低的系统,可以使用更小的元件(油缸,泵等等),这样钱就省下来了。关键的是,选一个好的控制器就行了!
高级的电液运动控制器可以具有很好的表现,即使固有频率与加速频率的比率小于4。高级的运动控制器具有除了PID增益,速度和加速度前馈之外的更多算法。
油缸直径基本上与固有频率成比例。如果运动控制器允许固有频率只是加速频率的两倍,油缸直径就可以减半。具体减多少可以参考VCCM方程。油缸直径减小一半意味着泵,阀,管道和蓄能器的尺寸都可以减小。这些成本的减小相对于控制器成本的增加来说,要多得多。此外,机器设备本身的运行,也更节省。
图3和图4已经显示了高级运动控制器可以带来的好处。图3,显示的是具有短行程的系统,其固有频率20Hz,而加、减速只需要0.125s。因此,加速频率是8Hz。实际的运动无法跟随,因为固有频率只是加速频率的2.5倍。图4,假定了在同样条件下,但采用了高级控制器的效果,跟踪误差大大减小。