ADRC控制算法[0]
ADRC控制算法也称为自抗扰算法,根据工业现场控制特性实现的原则,ADRC主要工作在执行层,其结构层主要是单环控制,类似于PID控制算法,其算法没有嵌套也没有额外的逻辑处理。
- 图书和论文
图书

论文
- 控制理论——模型论还是控制论 韩京清(专业研究方向的奠基论文)
- 自抗扰控制技术 韩京清
- 自抗扰控制思想探究 高志强 (控制专业的综述性论文可替代专业史)
- ADRC算法原理
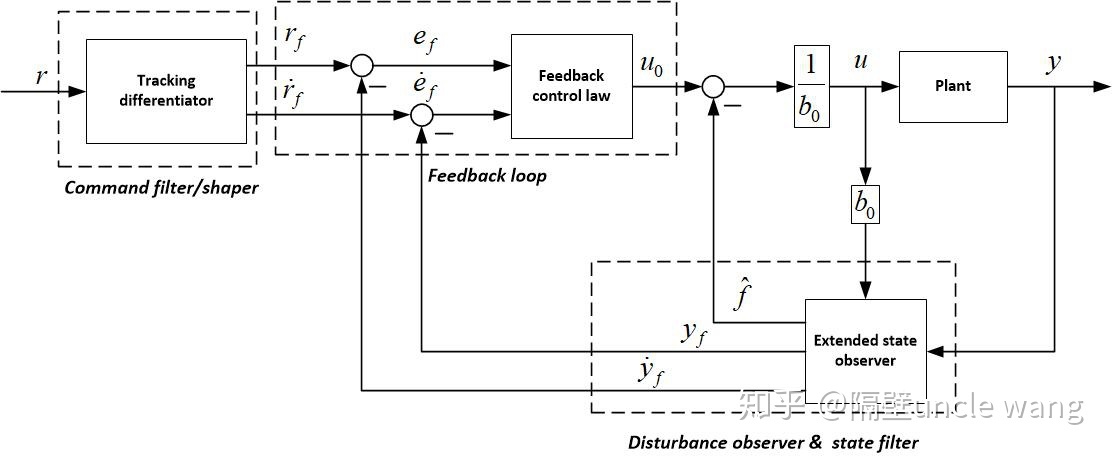
跟踪微分器(TD)
跟踪微分器解决了快速性和超调之间的矛盾关系,并且提高了调节器应对噪声污染的能力,增强了的鲁棒性。跟踪微分器的收敛性由的由郭宝珠和他的学生赵志良证明。
扩展状态观测器(ESO)
普通状态观测器只观测系统状态,扩展状态观测器还估计外部扰动和未知模型的系统状态。所以此项技术不过于依赖数学模型。
非线性组合(NF)
这部分类似PID的反馈控制,自抗扰是基于非线性状态误差反馈控制,所以韩京清[1]称之为非线性PID。也有人称之为:基于(扩展)状态观测器的反馈控制。
参考资料:
- https://www.zhihu.com/question/64738752