
摘要
到2016年为止,第一个关于两级电液伺服阀的专利已经过去了70年,而双喷嘴挡板伺服阀专利的授权也过去了60年。本篇文章主要回顾在那个时代关于伺服阀的一些设计,特别两级电液伺服阀。单级阀,也就是直动式或者比例阀的发展,在工业上而不是航空方面的应用,也做了简单回顾。接着,讨论了目前关于伺服阀技术的一些研究,特别是压电驱动以及增材制造。
1. 介绍
伺服阀是闭环电液运动控制系统的主要元件。“伺服阀”是指主阀芯位置与电信号成比例,而阀芯运动是由内部液动力驱动的。阀芯的运动改变节流口的大小,因此控制了流量;然而,流量取决于节流口压差,除非使用了压力补偿器。最常见的伺服阀设计就是带机械反馈的两级喷嘴挡板伺服阀(图1)。
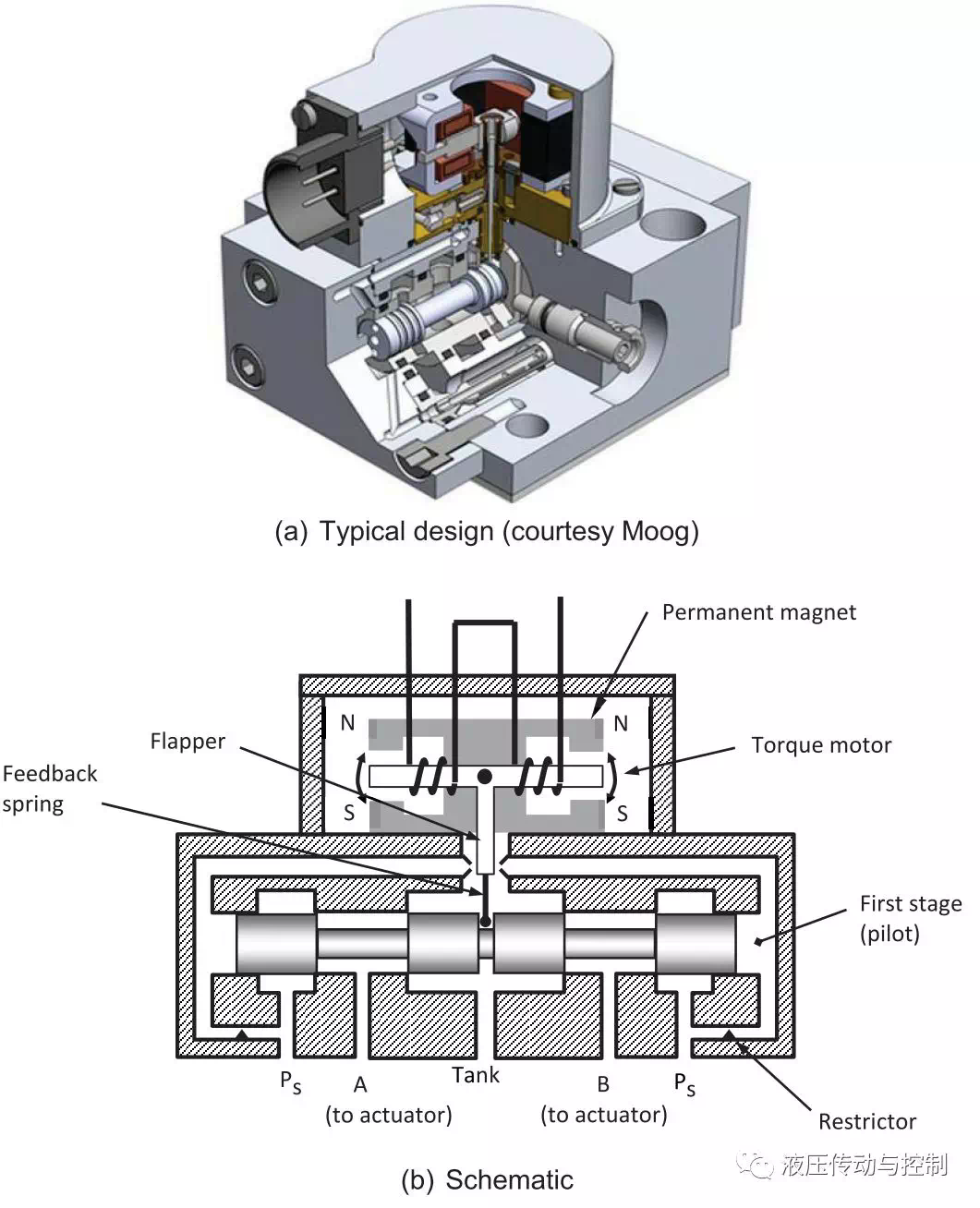
图1 两级喷嘴挡板伺服阀
主要元件有:
- 力矩马达作为电气与机械的转换器,由弹簧管支撑,其无摩擦偏转,隔离了力矩马达与液压油(图2a)。
- 挡板由力矩马达驱动,可以限制通过喷嘴的流量(图2b);挡板行程~0.1mm。也可以用单个喷嘴(图2c),其只能用于调节阀芯一侧的压力。但是由于液动力的不平衡,其对力矩马达有更高的要求。
- 第一级形成H型液压桥式回路,其中一对喷嘴是可变节流器,当挡板偏转的时候,会在阀芯两端产生压差。
- 反馈弹簧杆带动阀芯移动(行程大约~1mm),直到挡板的反馈力与力矩马达的力相平衡,挡板将再回到中心位置。
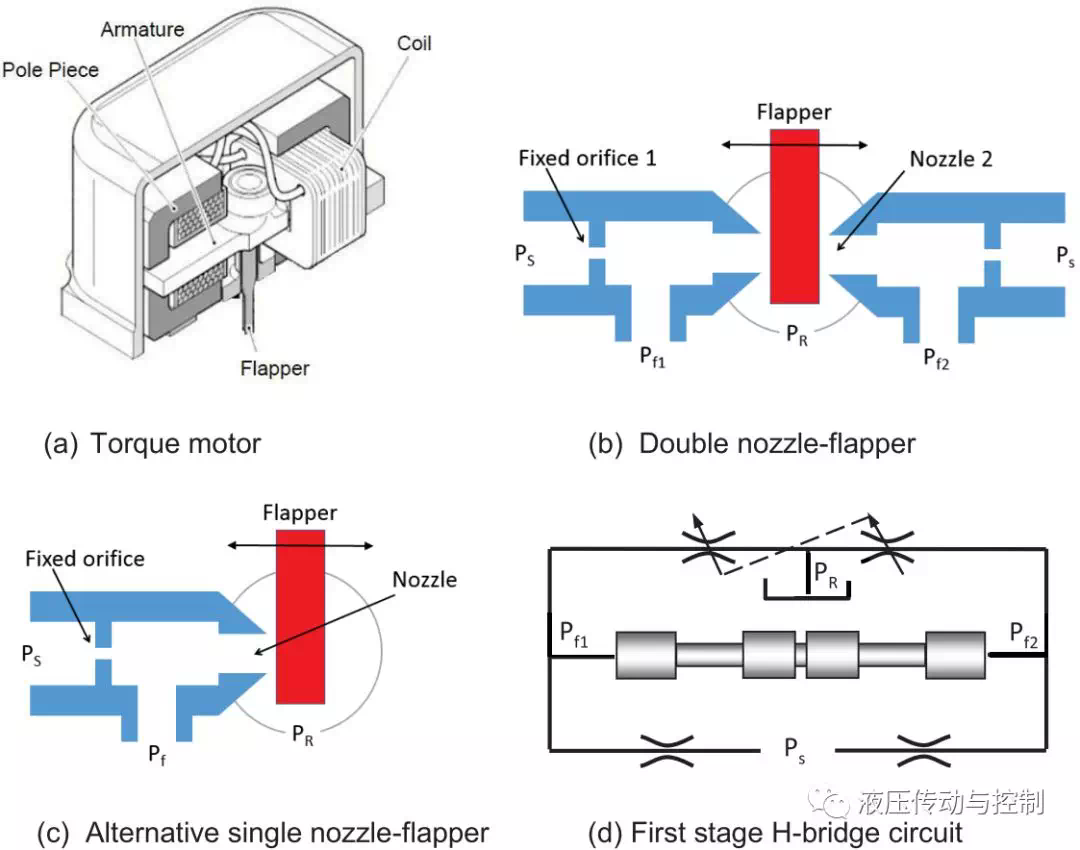
图2 喷嘴挡板先导级元件
伺服阀既是一个功率放大器,也是一个电气与液压的转换器。电气输入功率一般约0.1W,经过先导级放大之后,液压输出功率约达10W,经过主阀芯转换之后液压输出功率可达10kW。因此阀的功率放大因子达到105。对于一个三级阀,小阀芯驱动大阀芯,且带电气位置反馈,可以进一步带来另外100倍的功率放大。如果是4级阀,放大因子也是同此道理。
2. 发展历程
初期的电液伺服阀主要是为军事用途而开发,如用在二次世界大战的自动火炮瞄准。这类伺服阀典型的包含了电磁驱动阀芯,并带阀芯弹簧对中。主要用于流量控制,但是控制精度很低,响应也很慢。Tinsley工业仪表公司(伦敦)申请了第一个两级伺服阀专利(图3)。电磁铁(34)驱动第一级带弹簧对中的阀芯(47),其驱动一个旋转运动的主级(51),通过凸轮(54)把其位置反馈到第一级,反馈弹簧(59)把位置转换为力。
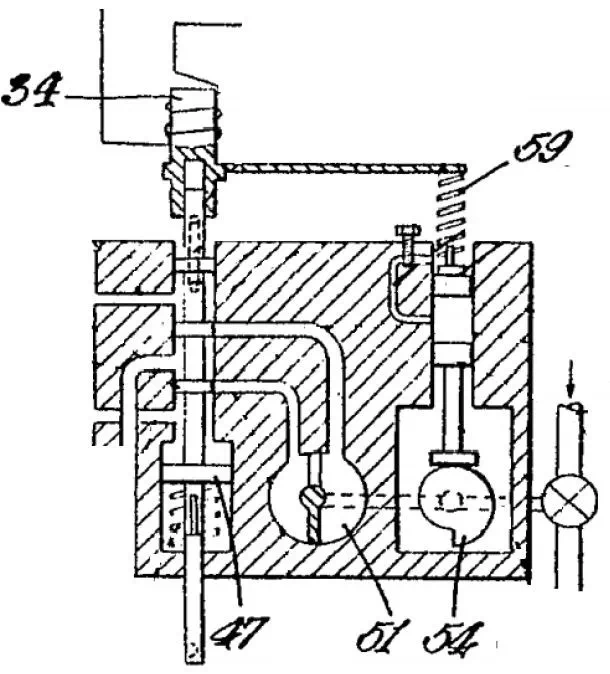
图3 Tinsley1946年发明的两级阀:
电磁铁 (34); 先导级阀芯 (47); 主级 (51); 反馈凸轮 (54); 反馈弹簧 (59)
伺服阀在20世纪50年代得到了迅猛发展,主要是因为航空工业(特别是导弹)的需求在驱动。技术状态的发展和产品的系列化都取得了长足进步。1955年,在美国的Bell,Bendix, Bertea, Cadillac Gage, Drayer Hanson, GE, Hughes, Hydraulic Controls, MIT, Midwestern Geophysical Labs, Honeywell, Moog, North American Aviation, Peacock, Pegasus, Raythoen, Sanders, Sperry, Standard Controls 和Westinghouse等公司,伺服阀被制造(至少是样机)出来。大家意识到,单级直接驱动电磁阀主阀芯仅限于低流量,主要是因为电磁力过小,不足以克服摩擦力,惯性力以及液动力。增加电磁执行器件的尺寸固然可以提高电磁力,但是由于电磁元件质量的增加以及更高的线圈电阻都会减小动态响应。
两级阀主要使用喷嘴挡板或者更小的滑阀作为先导级,虽然当时射流管已经出现,但被认为响应慢一些而主要用于工业而非航空用途。喷嘴挡板阀,无论是单喷嘴还是双喷嘴,从1920年之后,都已经很好的应用于气动控制系统,如Foxboro公司所制造的。第二级(或主级)有时采用弹簧对中,或者由内部的反馈,驱动主阀芯,使其与电气输入信号成比例。主阀芯位置反馈要么机械的,通过反馈弹簧杆加载电磁驱动力(力反馈),或者电气上即主级阀芯上使用位移传感器。液压反馈,通过负载压力与第一级压力的比较,用于压力控制应用。
部分制造商两级流量控制阀的清单见表1。由表可见,不同制造商,其电磁驱动、先导级和主级反馈等,都不是完全一样的。其中一些在图4和图5中解释。
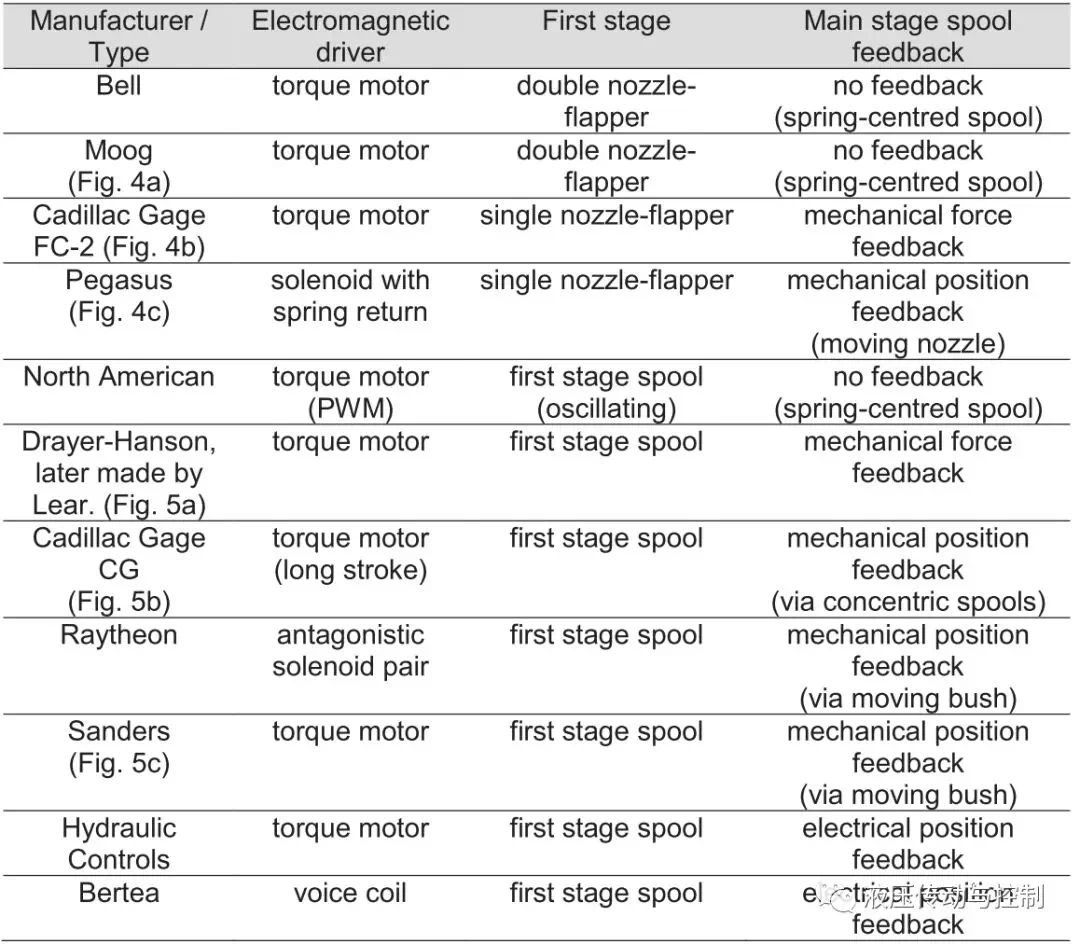
表1: 1955年开始的伺服阀设计
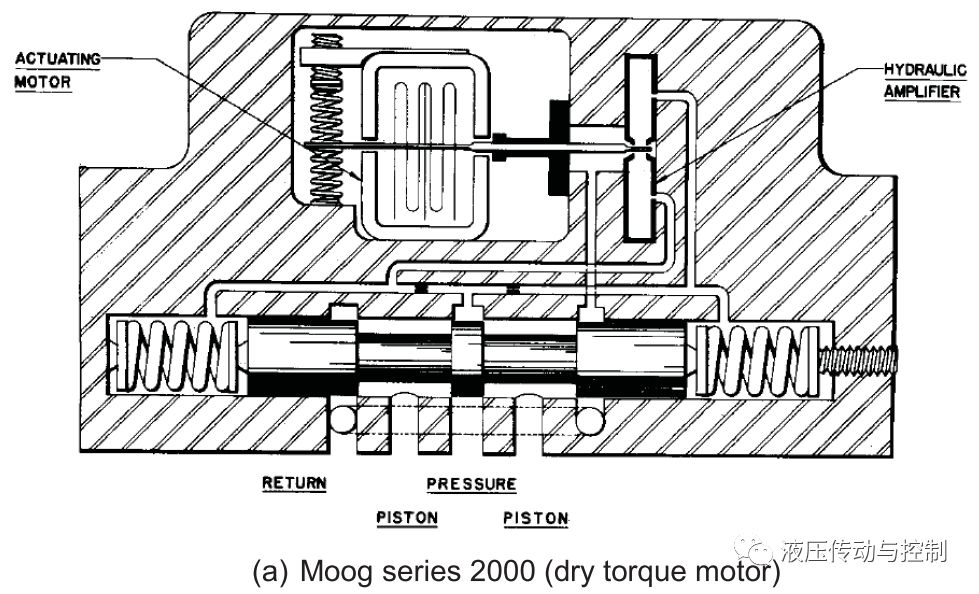
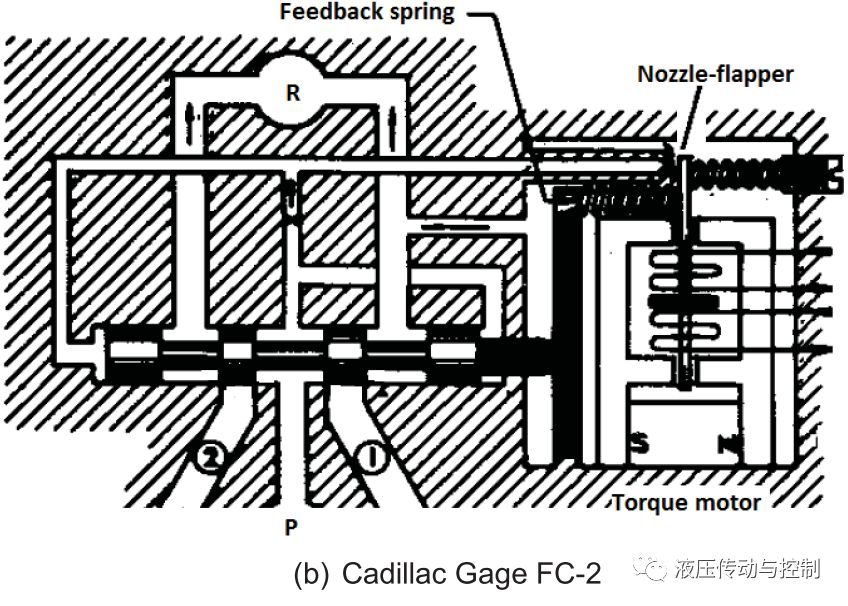
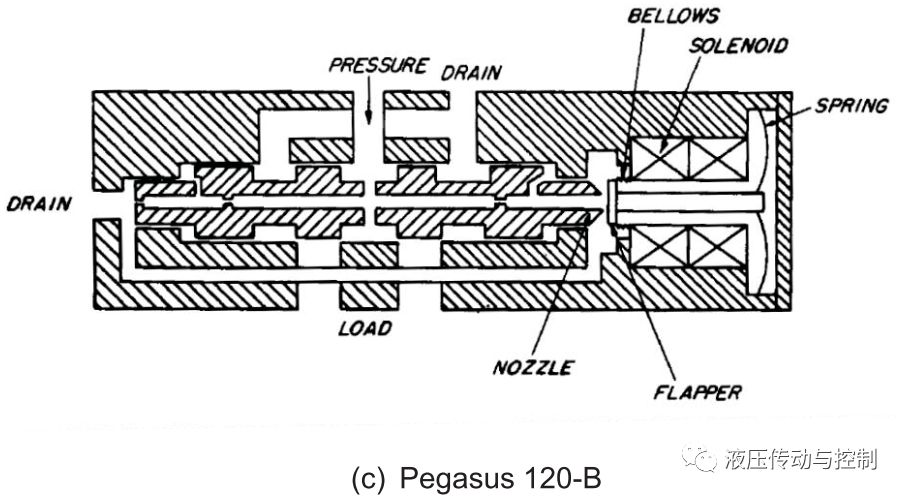
图4:1955年开始的喷嘴挡板设计
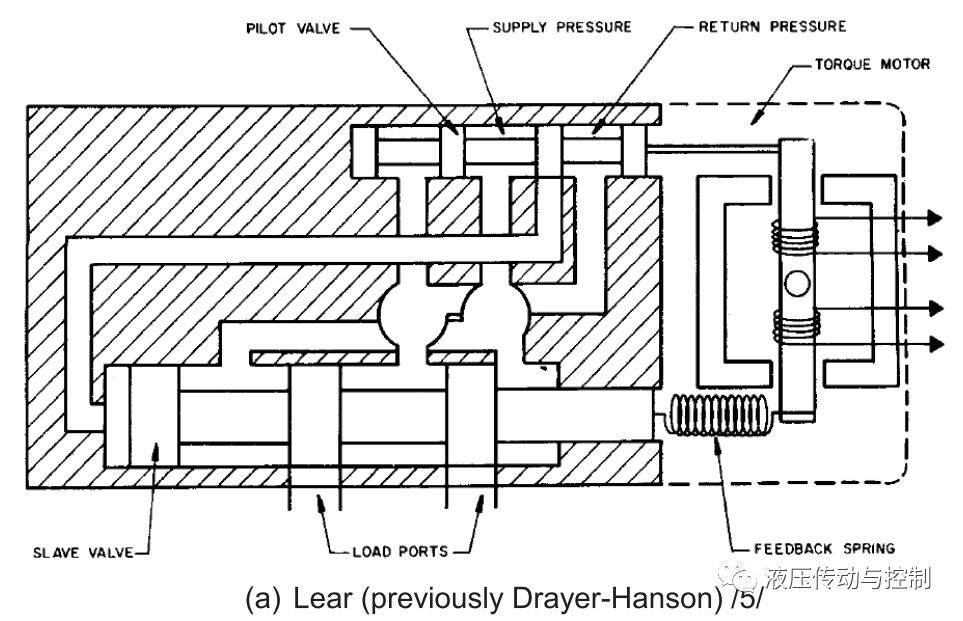
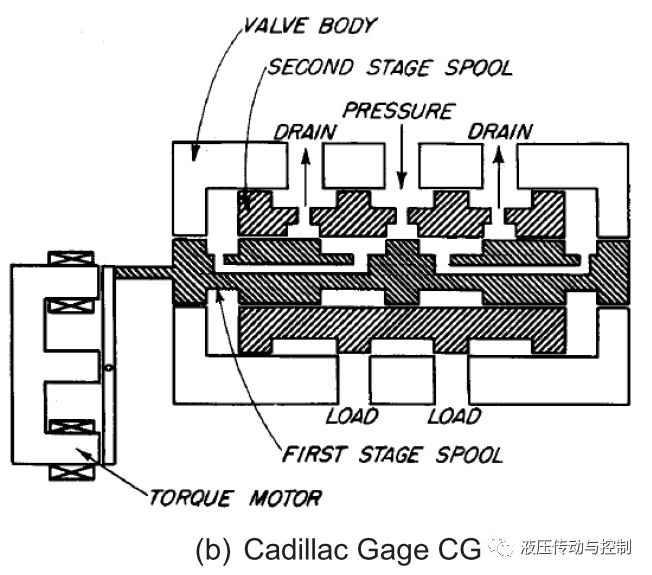
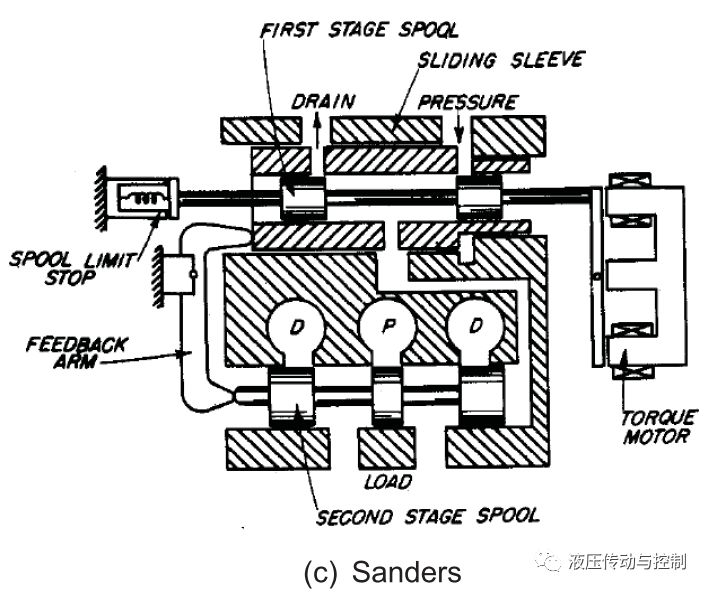
图5: 1955年开始的先导级滑阀设计
液压控制阀的最初设计是在MIT,并在由Blackburn,Reethof和Shearer合著的书上有详尽的描述。这本书是在50年代,由MIT员工给工业领域的工程师培训的一个课程。这种阀显示,电气位置反馈可以做得很有效,因此也带动了扭矩马达的发展。
Cadillac Gage FC-2 阀 (图 4b)值得我们注意的,它是两级阀的先驱,后来也成为了设计标准:它在先导级把力矩马达与喷嘴挡板结合起来(虽然是单喷嘴),主阀芯的机械力反馈采用反馈弹簧杆。
Moog阀(图4a)最初由W.C.(Bill)Moog在康奈尔航空实验室(Cornell AeronauticalLaboratory)设计,并用于航空与导弹发射控制应用。Moog带来了大量实际的提高。通过弹簧管支撑力矩马达,使得弹簧管偏置时更轻,摩擦力更小,减小了阀的阈值,提高了分辨率。1953年Moog获得了此项专利之后,又开始申请其它方面的专利,即改变单喷嘴设计的缺陷,提出了采用双喷嘴挡板的机构,以消除其对供油压力的敏感。
一个通常的故障就是磁性颗粒被油液带入聚集在力矩马达,这在Series 2000阀上第一次得到了解决,即通过把力矩马达和油液隔离开来。贝尔航空(BellAerospace)在1953年申请了此项专利。
到1957年为止,约另外17项阀的新设计出现了,并被美国空军评估,包括制造商Boeing, Lear, Dalmo Victor, Robertshaw Fulton, Hydraulic Research, Hagan和National Water。两级双喷嘴挡板阀开始占据市场主流。需要注意的是,喷嘴挡板的结构比先导级采用滑阀的结构制造上更便宜,因为所有先导级的滑阀都需要采用颤振频率克服摩擦,有时甚至是正遮盖。
下面的设计有些新颖的地方:
- Sanders SA17D – 音圈(voice coil)/双喷嘴挡板/机械力反馈:所有元件轴向布置。
- Cadillac Gage FC200 – 干式力矩马达/双喷嘴挡板/液压反馈
- Pegasus Model 20 – 音圈(voice coil)或者电磁铁/双喷嘴-双挡板/通过在阀芯端部设置小孔,实现机械位置反馈;双向对称版本(见图4c)
- Hagan – 音圈(voice coil)/ 先导级滑阀,旋转以减小摩擦/无反馈
同期反馈的技术问题主要是零漂(虽然主要原因是力矩马达的温度敏感性),喷嘴和挡板的锈蚀,力矩马达的非线性(如果设计电流过小),以及高频不稳定。当时,只有Moog和Cadillac Gage有批量生产的阀用于商用目的,Bendix也有很多阀,但只在最终客户那里进行测试。
3. 工业阀
到20世纪50年代底,两级机械力反馈伺服阀已经在军事和航空领域开始应用,主要包括航空和导弹飞行控制,雷达驱动和导弹发射,以及伺服液压系统开始应用于太空火箭的发射。
此时,伺服液压可能的工业应用也被人们逐渐意识到,大量的应用包括机床,注塑机,汽轮机,冶金轧机,以及仿真和测试工业的精密控制。一些工业阀是从航空阀改动而来的,比如“73”系列为最早的工业阀,是由Moog引入的。
工业阀必须要便宜,易维护,并包括如下特征:
- 阀体可更大,方便机加工
- 先导级独立,便于调整和维护
- 标准油口尺寸
- 内置过滤器,应对工业过滤略低的标准
相对于机械阀芯位置反馈,电气反馈可以获得更高的闭环增益,从而提高动态响应,而且也可以校正滞环或者温度效应引起的误差。机械反馈阀固有的安全和紧凑对航空领域来说具有很大的吸引力,但是在工业阀,从1970年之后开始采用电气反馈。这其中一个标志性的事件就是Bosch在1973年引入了板式安装伺服阀,带射流管,采用霍尔效应位置传感器,更重要的是带集成电子放大器。
Rexroth, Bosch, Vickers以及其它的液压制造商均开发了单级伺服阀,采用一对比例电磁铁控制弹簧对中的阀芯,开环控制,其与在20世纪50年代开发的单级阀类似,但是当时被航空工业应用给否决了。通过采用电气位置反馈和闭环控制,改善了控制精度以及响应时间。与比例电磁铁相比,线性力马达或者音控线圈执行器改善了线性度;80年代,用稀土磁体(Rare earth magnet)代替磁钢(Alnico magnet),克服了先导级输出力大小的局限性。这种直动式阀由Moog开发(图6),之后Parker也开发了类似产品,其具有与二级阀相当的动态响应。
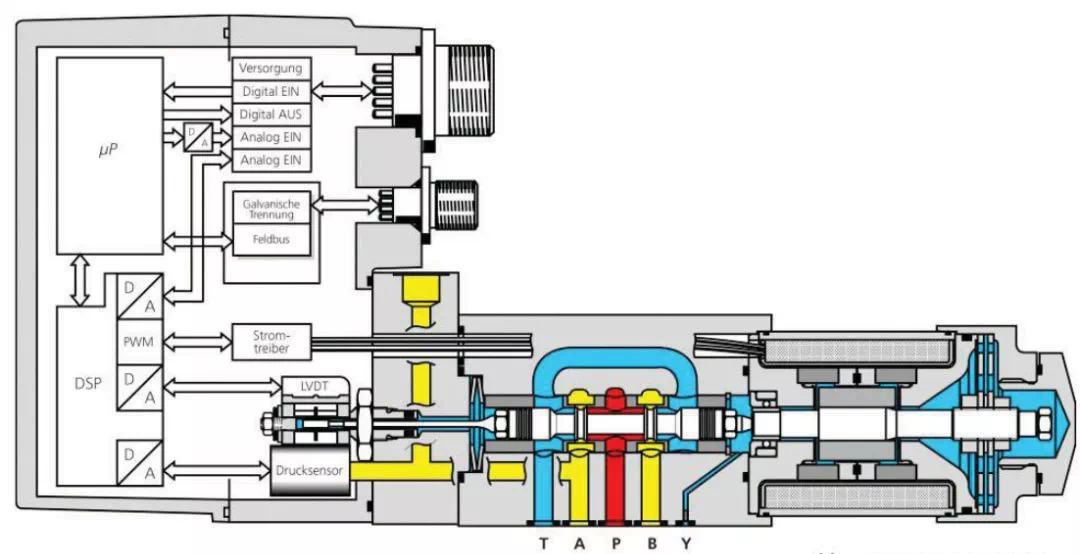
图6:力马达直接驱动,集成电子
表2示出了典型阀的特性,包括阀芯驱动力型式。高的阀芯驱动力不仅有利于克服液动力,加速阀芯运动,而且可以更好的克服小颗粒污染物的夹杂,从而避免卡阀。
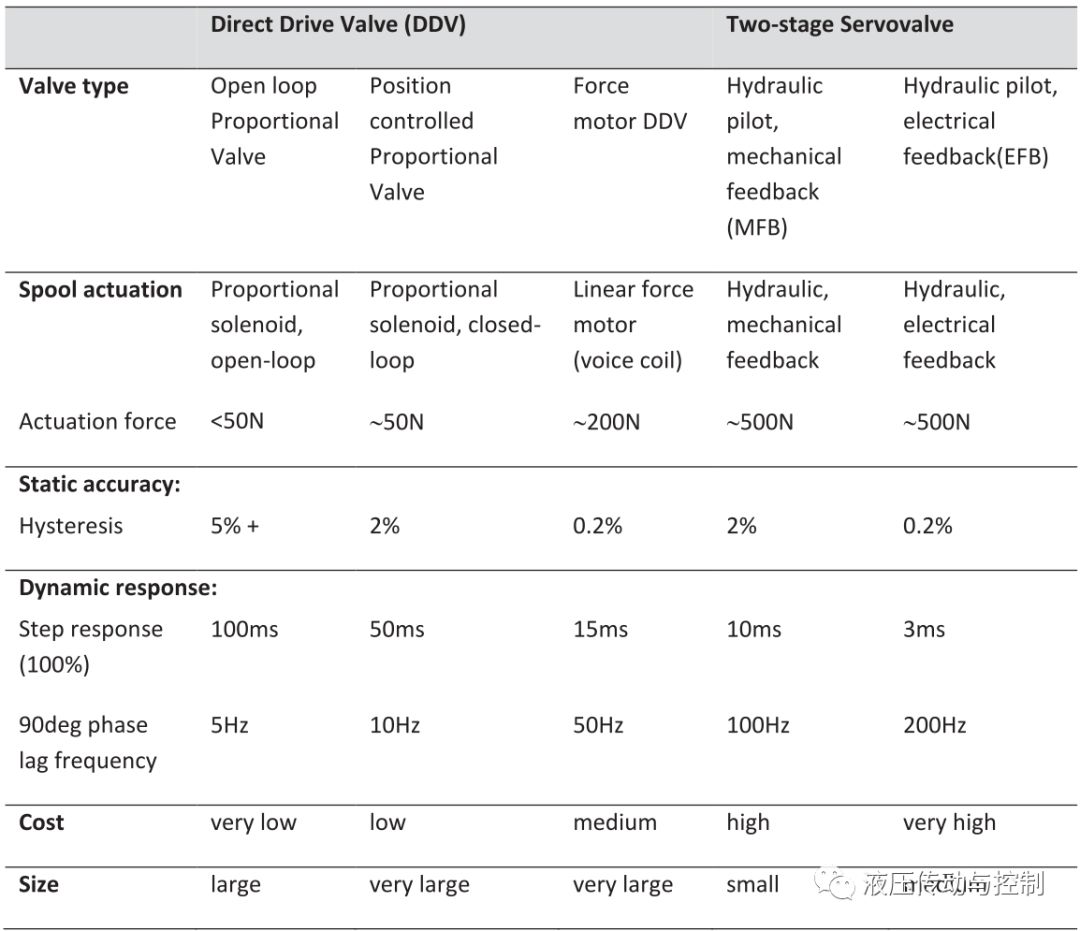
表 2: 典型4通阀的性能参数@额定流量40L/min(70bar压降)
4. 新颖的电液伺服阀设计
这些年来,各种各样的关于阀的设计被探索和开发出来,用以提高动态响应,减小泄漏,改善维护性或者提升其它相对于传统阀的优点。大部分的研究都集中在采用新的方法来改善阀芯驱动,其常常涉及到新材料的应用。
4.1 压电效应执行器
当电场作用的时候,压电陶瓷变形非常快,但是最大变形量很小,大约只有0.15%。因此,采用堆栈方式的执行器(图7a)实际上也需要运动的放大,即使在先导级(例如挡板运动大概0.1mm)。矩形弯曲执行器(图7b)可以为先导级提供足够的位移,合理的力范围(10N~100N)。此种弯曲型式的陶瓷层厚度大约20μm,因此电压大约至50V,可提供足够的磁场强度。然而,压电陶瓷材料受制于滞环(典型的20%),蠕动,堆栈执行器长度取决于温度等因素的影响。由于执行器表现得像一个电容,响应速度通常受限于放大器电流的限制。
在1955年关于阀的调查中,电机械转换的执行器只有电磁的方式,但也提到“压电晶体”被用于某些试验模型,以获取更好的响应。然而,到目前为止还是没有被广泛接受,由于对其抗震性能,温度变化,电气噪音等的高度怀疑,以及较难从晶体里获取足够的位移。压电晶体的阀在1955已有专利,包括压电晶体挡板用于双喷嘴挡板阀,还有传递流体的压电晶体油泵。
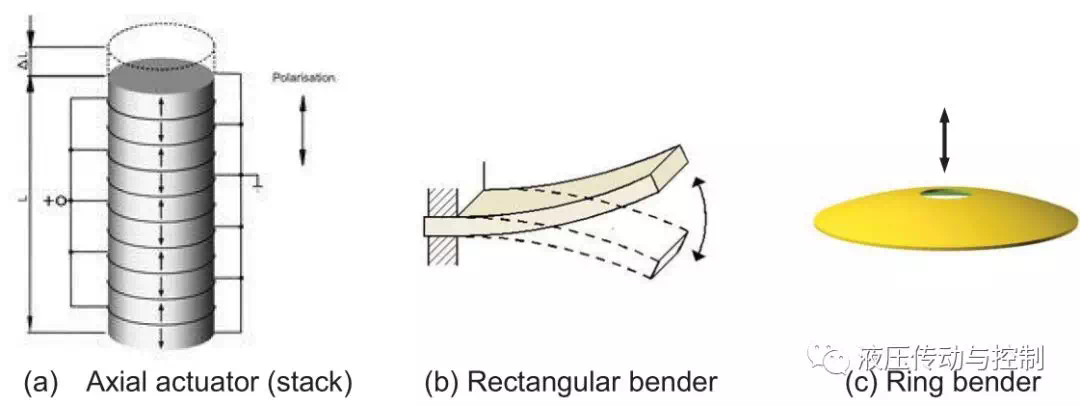
图7:压电效应
采用堆栈方式的执行器驱动阀芯需要一些运动放大。比如采用静压变压器,内充硅橡胶并带有一定的面积比率。相位滞后-90°的带宽频率可达270Hz,并且在阀芯两端采用两个反向的执行器以减小温度敏感性(图8)。机械放大采用连杆的方式(图9)。
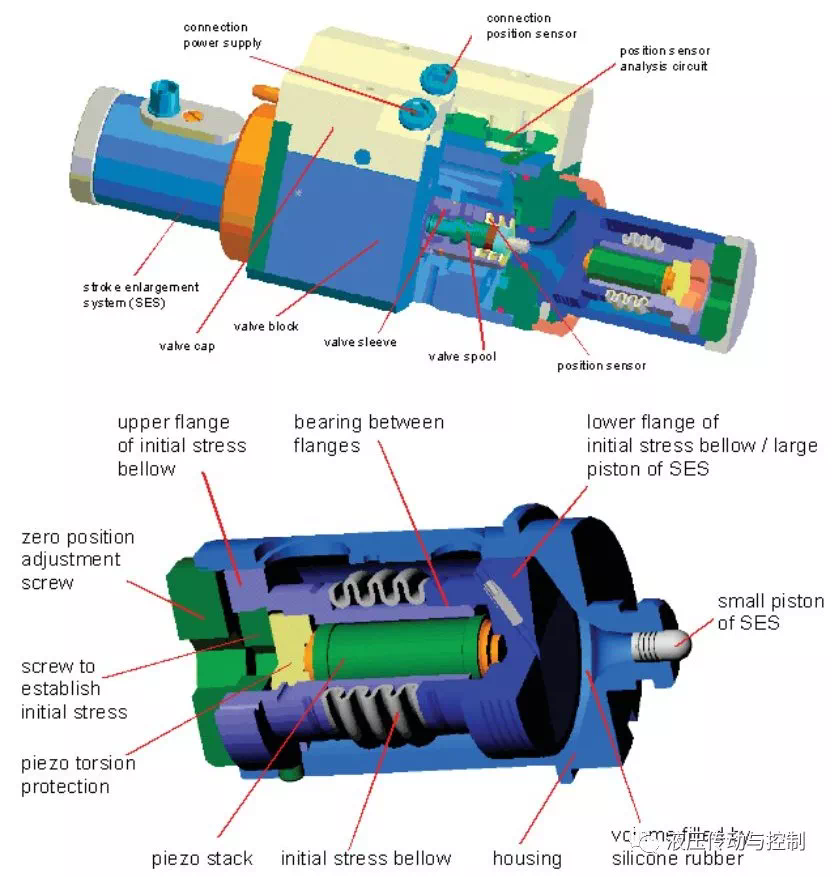
图 8:阀芯运动带静压放大压电堆栈运动
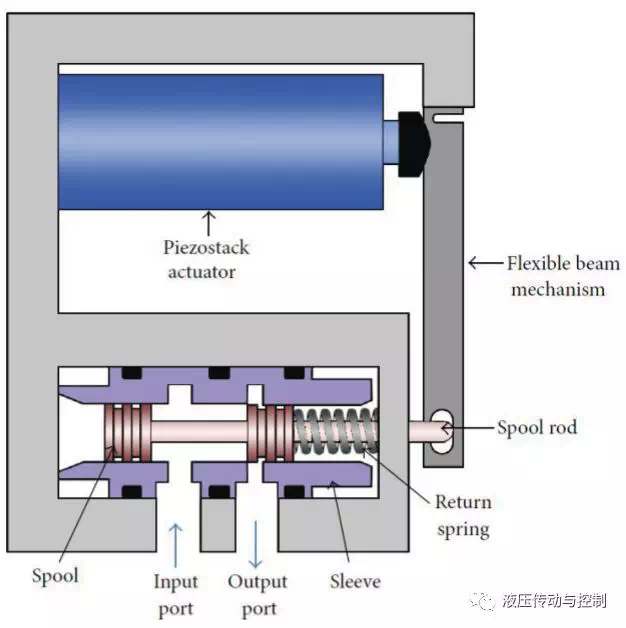
图 9:阀芯运动,带机械放大压电堆栈运动
采用压电执行器代替二级阀中的力矩马达在众多的研究中均有报告。图10,该伺服阀采用机械反馈阀移动挡板。图11,一种航空伺服阀,带反馈杆,采用矩形压电陶瓷弯曲执行器来驱动偏转装置,发明者认为其在射流管处只会产生更小的液动力。与力矩马达相比,其被认为压电陶瓷弯曲执行器可以更好加工,更好测试,以及具有更好的重复性。在最近的一个样机中,环形执行器被用于先导级。先导级是迷你阀,带正遮盖以弥补泄漏。采用电气位置反馈的阀见图12。
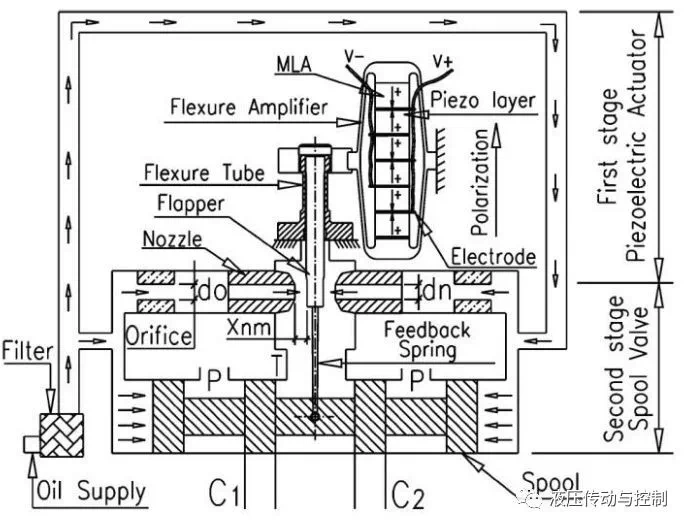
图10:压电堆栈,用于两级阀
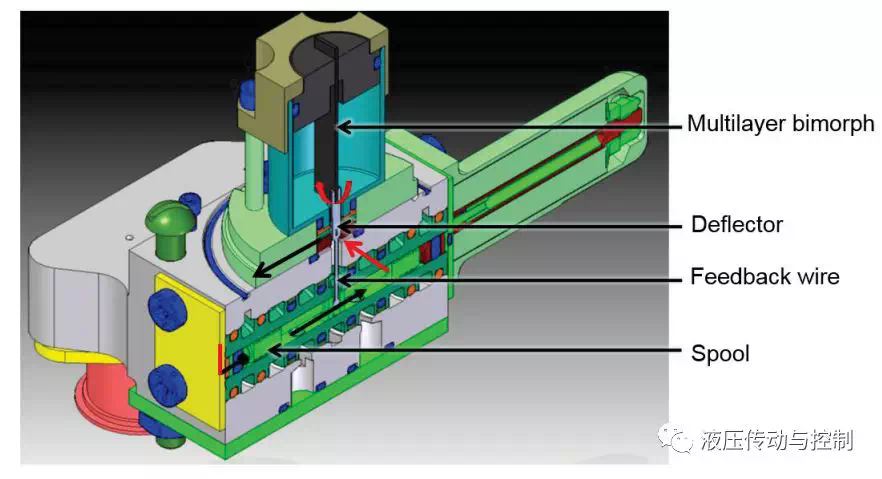
图 11:压电矩形弯曲执行器,射流管两级机械反馈阀
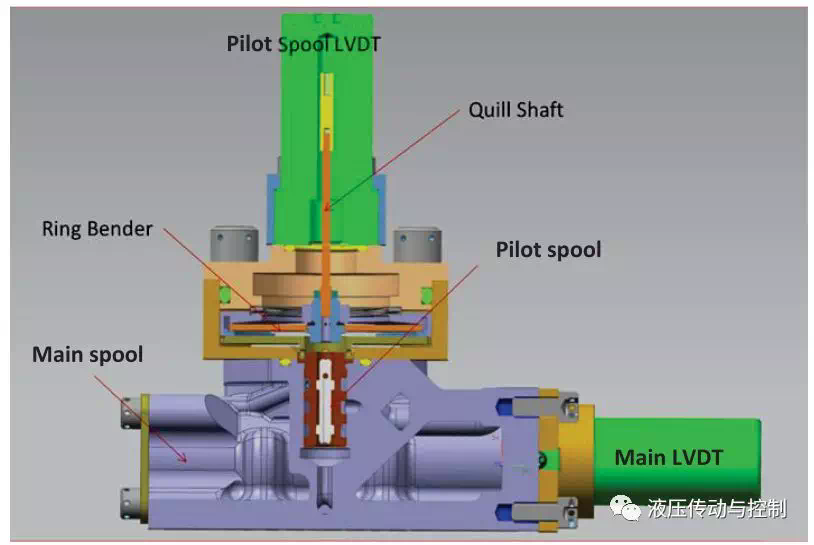
图 12:压电环形弯曲执行器 先导阀芯 两级电反馈阀
另外一种采用压电陶瓷堆栈工作原理的阀如图13。先导级的4个节流口构成H-桥式回路,且均是可调的,采用汽车燃油喷射,带40μm行程,-90°的带宽达到1kHz以上。
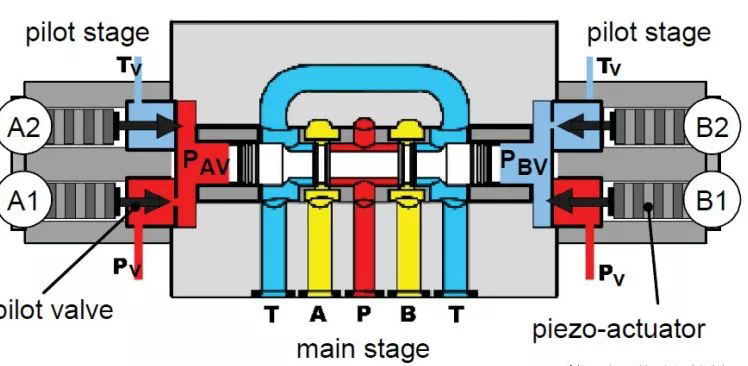
图 13:独立的压电效应控制 先导级H桥式回路节流孔
图14所示的是另外一种提高直动式阀的快速响应的新理念。采用堆栈技术,阀芯阀套移动范围+/-20μm,相当于传统的线性力马达+/-1mm的移动距离。因此,即使在高于60Hz以上的频宽,也可以实现很精密的流量控制。
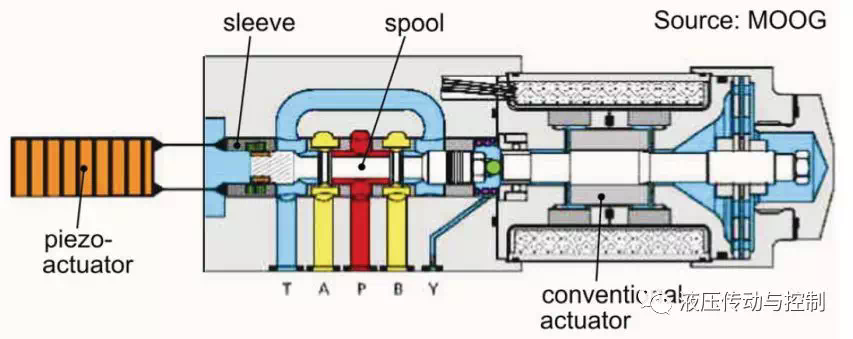
图 14:双作用阀 高频响 长行程执行器
4.2 其它的一些新设计
磁致伸缩是另外一种材料现象,可被用于创造“智能执行器”。磁致伸缩阀芯的运动也已经被测试很多年。它面临的与压电陶瓷一样的挑战,如有限位移量,滞环,温度敏感性等。
4.3 增材制造
增材制造Additive Manufacturing,俗称3D打印,给液压元件的制造带来新的方法。AM可以用以减轻阀块的重量,更重要的是提供设计者更多的设计自由度,因为不需要考虑一些加工制造的约束。例如图12所示的压电效应阀,采用激光熔融技术,用钛合金制造阀块。图15显示了最终的成品阀,图16显示的是AM阀体,图17示例了CT扫描阀体的内部情况。
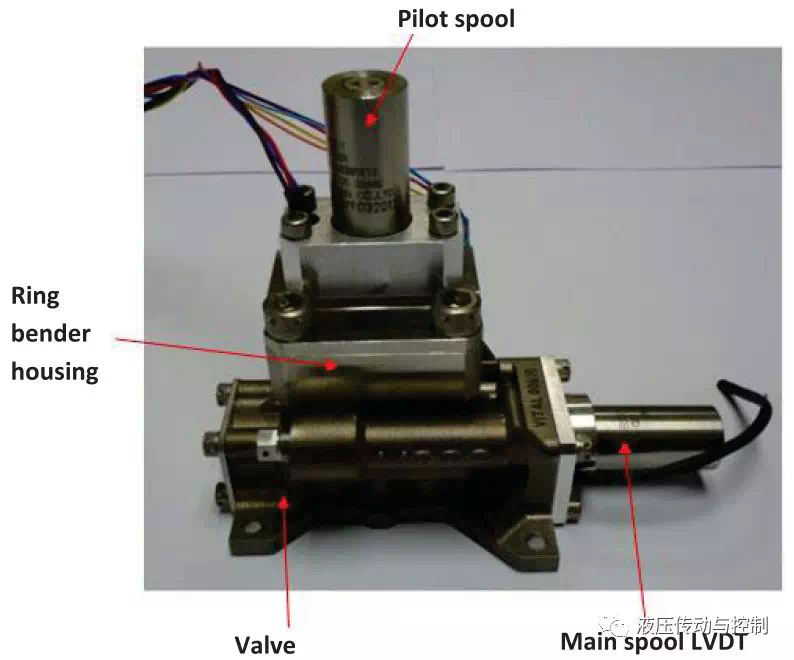
图 15:原型 增材制造
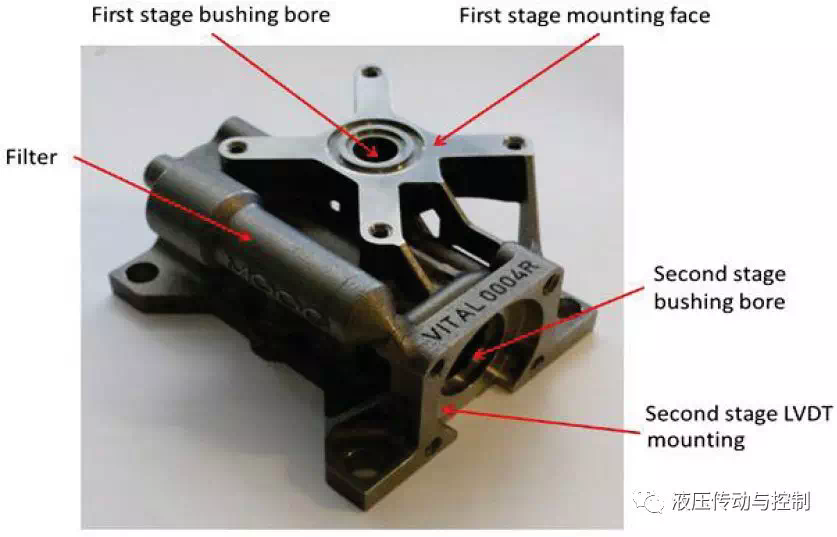
图 16:AM制造阀体细节
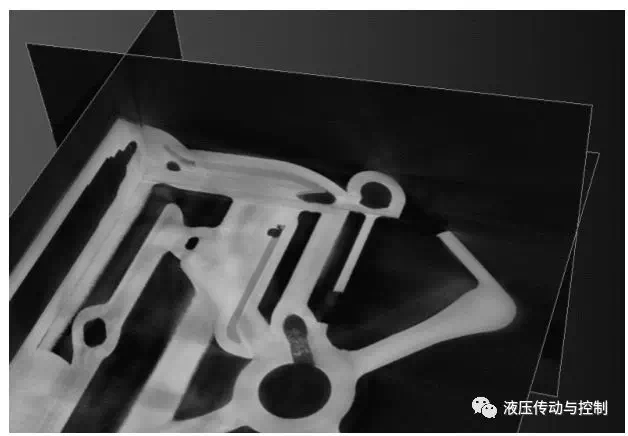
图 17:CT扫描阀体
5. 结论
一些基本的关于单级阀或者两级阀的设计理念在20世纪50年代中期被提出来的。两级的机械反馈的伺服阀在60年达开始应用于航空,以及一些高性能要求的工业领域。单级阀,带比例电磁铁或者线性力马达驱动阀芯的,在70年代和80年代作为一种低成本解决方案,开始应用于工业系统,并且随着阀芯位置带反馈和集成电子的应用不断增长。
力矩马达驱动的两级伺服阀得到了极大的成功应用。尽管如此,手工安装和调整力矩马达始终证明是必须的。在一些应用,寻找一些潜在的具有更高动态响应的压电效应伺服阀或者其它材料,吸引越来越多的兴趣。尽管60年来,人们没有停止对新材料,新技术的研究,但是力矩马达依然继续在使用。也许将来,会出现真正的竞争者。
增材制造,特别是在制造量不太大(例如在航空航天)的时候,消除了阀体和其他液压元件中的许多制造限制。这将使一些设计思想突破物理的限制,而加工制造的潜能将得到进一步发挥。
进一步的发展趋势是伺服阀的智能化。集成自校正功能、状态监测和通信能力的提高是工业电液伺服阀的发展趋势,也将在航空航天得到应用。
应该注意的是,阀控液压系统的面临的挑战正在发生,如采用电液执行器(伺服泵控制执行器),或泵伺服变量控制的机器更节能。然而,这种系统的功率密度和动态响应远远低于传统的阀控系统,所以技术的发展轨迹依然是不确定的。